J. K. Kim, D. W. Kwon, and S. Jung, "Deep Learning-based Heading Angle Estimation for Enhanced Auto nomous Vehicle Backward Driving Control", INTERNATIONAL JOURNAL OF CONTROL AUTOMATION AND SYSTEMS, 2025.
B. Suthar, M. Zubair, and S. Jung, "Self-folding gravity compensation mechanism for a supplementary folding robot arm: Design, analysis and implementation", Robotics and Autonomous Systems, 2025.
2024
S. Jung, "A Data-driven Control Scheme for Improving Tracking Control Performance of Robot Manipulators: Experimental Studies", INTERNATIONAL JOURNAL OF CONTROL AUTOMATION AND SYSTEMS, 2024.
S. Jung, "Cartesian Time-delayed Control to Improve Hybrid Force Control Performance of Robot Manipulators Under Uncertain Environment and Unknown Dynamics", INTERNATIONAL JOURNAL OF CONTROL AUTOMATION AND SYSTEMS, 2024.
2023
S. Jung, "Sliding Mode Control for a Hybrid Force Control Scheme of a Robot Manipulator Under Uncertain Dynamics", INTERNATIONAL JOURNAL OF CONTROL AUTOMATION AND SYSTEMS, 2023.
S. Jung, "Analysis of Bilinear Force Tracking Control for Robot Manipulators Under Unknown Environment", INTERNATIONAL JOURNAL OF CONTROL AUTOMATION AND SYSTEMS, 2023.
2022
MOHAMMAD ZUBAIR, BHIVRAJ SUTHAR , AND SEUL JUNG. "Design and Analysis of Flexure Mechanisms for Human Hand Tremor Compensation", IEEE ACCESS, 2022.
2021
Bhivraj Suthar and Seul Jung. ” Design and Feasibility Analysis of a Foldable Robot Arm for Drones Using a Twisted String Actuator: FRAD-TSA.”,IEEE Robotics and Automation Letters, 2021 (Accepted)
Bhivraj Suthar and Seul Jung. ”Design and Bending Analysis of a Metamorphic Parallel Twisted-Scissor Mechanism”,Transactions of ASME-Journal of Mechanisms and Robotics, 2021
2020
Sang D. Lee and S. Jung. "A Monte Carlo Dual-RLS Scheme for Improving Torque Sensing without a Sensor of a Disturbance Observer for a CMG."IJCAS, 2020
S. Jung. "A Neural Network Technique of Compensating for an Inertia Model Error in a Time-delayed Controller for Robot Manipulators."IJCAS, 2020
Hyun woo Kim and S. Jung. "Design and Control of a Sphere Robot Using a Control Moment Gyroscope Actuator for Navigation."IJCAS, vol. 18, no. 12, pp. 3112-3120, 2020.
2019
Sang D. Lee and S. Jung. "Real-time Inverse Model Estimation by a Recursive Least Squares Method for Disturbance Observer-based Control Systems: Balancing Control of a Single-wheel Robot."IJCAS, pp. 1911-1920, 2019
Sang D. Lee and S. Jung. "A Decentralized Model Identification Scheme by Random-walk RLS Process for Robot Manipulators: Experimental Studies."IJCAS, pp. 1856-1865, 2019
Sang D. Lee and S. Jung. "Experimental Verification of a Novel Quad-RLS Technique for Improving Real-time System Identification Performance: A Practical Approach to CMG."IJCAS, pp. 1524-1534, 2019
2018
Lee, Sangdeok, and Seul Jung. "Practical implementation of a factorized all pass filtering technique for non-minimum phase models."International Journal of Control, Automation and System, to be published(2018).
Lee, Sangdeok, and Seul Jung. "An adaptive control technique for motion synchronization by on-line estimation of a recursive least square method."International Journal of Control, Automation and System, to be published(2018).
Bae, YeongGeol, and Seul Jung. "Balancing control of a mobile manipulator with two wheels by an acceleration-based disturbance observer."International Journal of Humanoid Robotics, to be published(2018).
Seul Jung. "Improvement of Tracking Control of a Sliding Mode Controller for Robot."International Journal of Control, Automation and Systems 16.2(2018): 937-943. PDF
Lee, Sangdeok, and Seul Jung. "A compensation approach for nonlinear gimbal axis drift of a control moment gyroscope."Mechatronics 50 (2018): 45-54. PDF
Lee, Sangdeok, and Seul Jung. "Experimental Verification of Singularity-Robust Torque Control for a 1.2-Nm–5-Hz SGCMG."IEEE Transactions on Industrial Electronics 65. 6 (2018): 4871-4879. PDF
2017
Lee, Sangdeok, and Seul Jung. "Awakening Strategies from a Sleeping Mode to a Balancing Mode for a Sphere Robot."International Journal of Control, Automation and Systems 15.6 (2017): 2840-2847. PDF
Seul Jung. "Stability Analysis of Reference Compensation Technique for Controlling Robot Manipulators by Neural Network."International Journal of Control, Automation and Systems 15.2 (2017): 952-958. PDF
Lee, Sangdeok, and Seul Jung. "Detection and control of a gyroscopically induced vibration to improve the balance of a single-wheel robot."Journal of Low Frequency Noise, Vibration and Active Control 10.1177/0263092317716075 (2017). PDF
2016
Jeong, Seung Ho, and Seul Jung. "Cartesian space control of a quadrotor system based on low cost localization under a vision system."International Journal of Control, Automation and Systems 14.2 (2016): 549-559. PDF
Lee, Sangdeok, and Seul Jung. "Design of a Fuzzy Compensator for Balancing Control of a One-wheel Robot."International Journal of Fuzzy Logic and Intelligent Systems 16.3 (2016): 188-196. PDF
2015
Cho, Sung Taek, and Seul Jung. "Combining Two Control Techniques for the Fast Movement of a Two-Wheel Mobile Robot."International Journal of Humanoid Robotics 12.02 (2015): 1550020. PDF
Kim, J. S., and S. Jung. "Implementation of the RBF neural chip with the back-propagation algorithm for on-line learning."Applied Soft Computing 29 (2015): 233-244. PDF
2014
Jeong, S. H., and S. Jung. "A quad-rotor system for driving and flying missions by tilting mechanism of rotors: From design to control."Mechatronics 24.8 (2014): 1178-1188. PDF
Jung, Seul. "An impedance force control approach to a quad-rotor system based on an acceleration-based disturbance observer."Journal of Intelligent & Robotic Systems 73.1-4 (2014): 175-185. PDF
Kim, H. W., and S. Jung. "Control of a two-wheel robotic vehicle for personal transportation."Robotica 34.05 (2016): 1186-1208. PDF
Ahn, Jaekook, and Seul Jung. "Experimental Studies of Swing Up and Balancing Control of an Inverted Pendulum System Using Intelligent Algorithms Aimed at Advanced Control Education."International Journal of Fuzzy Logic and Intelligent Systems 14.3 (2014): 200-208. PDF
Jung, Seul. "Neural network compensation for impedance force controlled robot manipulators."International Journal of Fuzzy Logic and Intelligent Systems 14.1 (2014): 17-25. PDF
2013
Lee, G. H., and Seul Jung. "Line tracking control of a two-wheeled mobile robot using visual feedback."International Journal of Advanced Robotic Systems 10 (2013): 1-8. PDF
Lee, Seung Jun, and Seul Jung. "Object handling control among two-wheel robots and a human operator: An empirical approach."International Journal of Control, Automation and Systems 11.2 (2013): 346-353. PDF
Jung, Seul. "Experiences in developing an experimental robotics course program for undergraduate education."IEEE Transactions on Education 56.1 (2013): 129-136. PDF
Lee, J. H., et al. "Balancing control of a single-wheel inverted pendulum system using air blowers: Evolution of Mechatronics capstone design."Mechatronics 23.8 (2013): 926-932. PDF
Jeong, Seungho, and Seul Jung. "Design, control, and implementation of small quad-rotor system under practical limitation of cost effectiveness."International Journal of Fuzzy Logic and Intelligent Systems 13.4 (2013): 324-335. PDF
Park, J. H., and S. Jung. "Development and control of a single-wheel robot: Practical Mechatronics approach."Mechatronics 23.6 (2013): 594-606. PDF
Ahn, Jae Kook, and Seul Jung. "Development of a two-wheel mobile manipulator: balancing and interaction control."Robotica 32.07 (2014): 1135-1152. PDF
2012
Kim, Hyunwook, and Seul Jung. "Fuzzy Logic Application to a Two-wheel Mobile Robot for Balancing Control Performance."Int. J. Fuzzy Logic and Intelligent Systems 12.2 (2012): 154-161. PDF
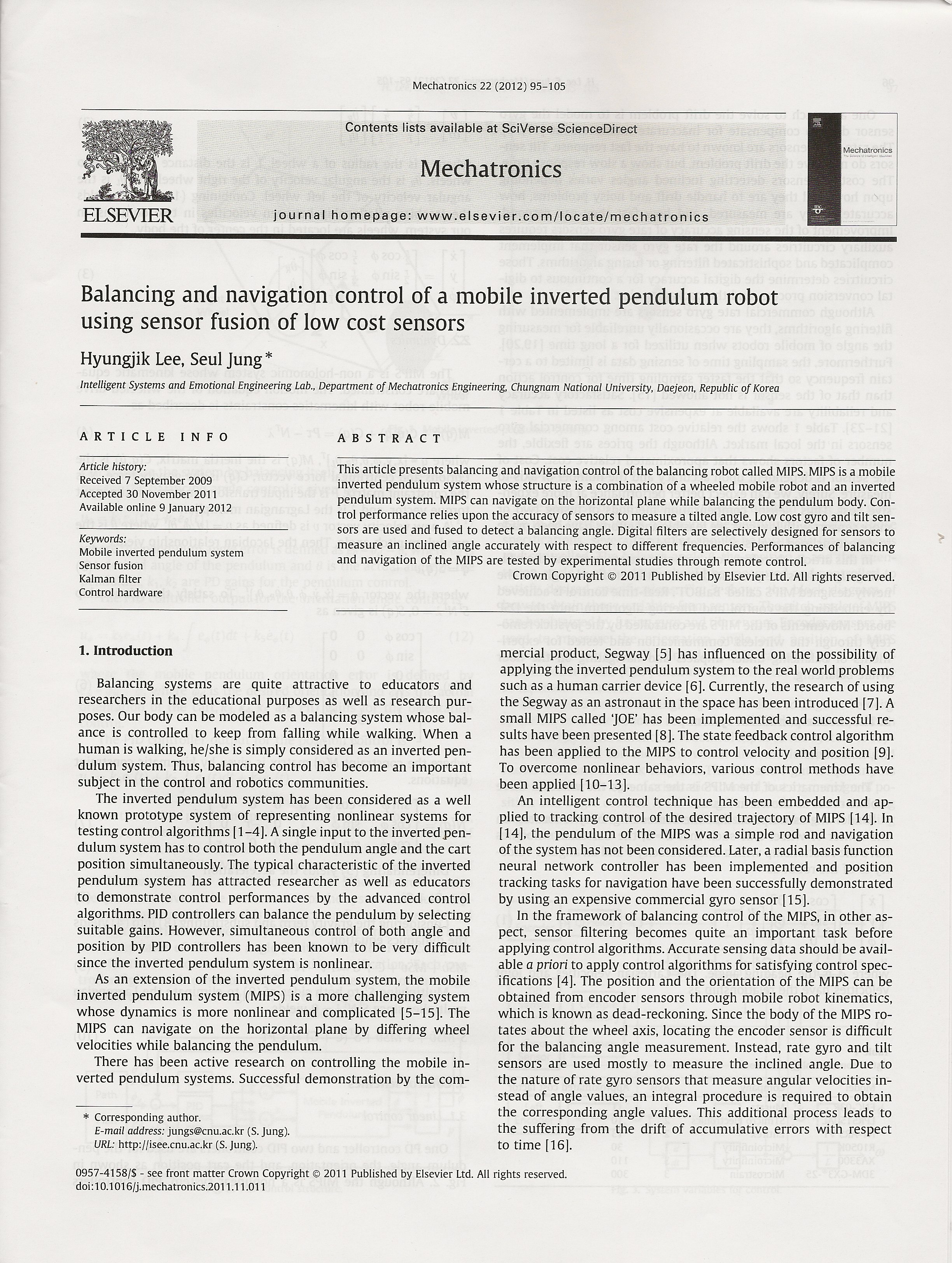
Lee, Hyungjik, and Seul Jung. "Balancing and navigation control of a mobile inverted pendulum robot using sensor fusion of low cost sensors."Mechatronics 22.1 (2012): 95-105. JPG
Kim, P. K., and S. Jung. "Experimental studies of neural network control for one-wheel mobile robot."Journal of Control Science and Engineering 2012 (2012): 3. PDF
Jeon, Sang W., and Seul Jung. "Hardware-in-the-loop simulation for the reaction control system using PWM-based limit cycle analysis."IEEE Transactions on control systems technology 20.2 (2012): 538-545. PDF
2010
Lee, Hyung Jik, and Seul Jung. "Guidance control of a wheeled mobile robot with human interaction based on force control."International Journal of Control, Automation and Systems 8.2 (2010): 361-368.
Lee, Geun Hyeong, and Seul Jung. "Experimental Studies of Neural Compensation Technique for a Fuzzy Controlled Inverted Pendulum System."International Journal of Fuzzy Logic and Intelligent Systems 10.1 (2010): 43-48.
Noh, Jin Seok, Geun Hyeong Lee, and Seul Jung. "Position control of a mobile inverted pendulum system using radial basis function network."2008 IEEE International Joint Conference on Neural Networks (IEEE World Congress on Computational Intelligence). IEEE, 2008.
2009
Lee, Geun-Hyung, and Seul Jung. "Neuro-fuzzy control of inverted pendulum system for intelligent control education."International Journal of Fuzzy Logic and Intelligent Systems 9.4 (2009): 309-314.
Jeon, Sang-Woon, and Seul Jung. "Novel analysis of limit cycle for PWM signal of PD control system."IEICE Electronics Express 6.11 (2009): 787-793.
2008
Cho, Hyun-Taek, Sung-Su Kim, and Seul Jung. "Experimental studies of real-time decentralized neural network control for an xy table robot."International Journal of Fuzzy Logic and Intelligent Systems 8.3 (2008): 185-191.
Jung, Seul, and Sung Su Kim. "Control experiment of a wheel-driven mobile inverted pendulum using neural network."IEEE Transactions on Control Systems Technology 16.2 (2008): 297-303.
Song, Deok-Hee, Geun-Hyeong Lee, and Seul Jung. "Neural network compensation technique for standard PD-like fuzzy controlled nonlinear systems."International Journal of Fuzzy Logic and Intelligent Systems 8.1 (2008): 68-74.
2007-
Jung, Seul, Poongwoo Jeon, and Tien C. Hsia. "Contour tracking of an unknown planar object by regulating force for mobile robot navigation."Robotica 25.03 (2007): 297-305.
Jung, Seul, and Sung su Kim. "Hardware implementation of a real-time neural network controller with a DSP and an FPGA for nonlinear systems."IEEE Transactions on Industrial Electronics 54.1 (2007): 265-271.
Kim, S., and Seul Jung. "Hardware Implementation of a Neural Network Controller with an MCU and an FPGA for Nonlinear Systems."International Journal of Control Automation and Systems 4.5 (2006): 567.
Seul Jung and Hyun Taek Cho "Decentralized Neural Network Reference Compensation Technique for PD Controlled Two Degrees of Freedom Inverted Pendulum."IJCAS 2.1 (2004): 92-99.
Jung, Seul, Tien C. Hsia, and Robert G. Bonitz. "Force tracking impedance control of robot manipulators under unknown environment."IEEE Transactions on Control Systems Technology 12.3 (2004): 474-483.
Jung, Seul, Tien C. Hsia, and Robert G. Bonitz. "Force tracking impedance control for robot manipulators with an unknown environment: theory, simulation, and experiment."The International Journal of Robotics Research 20.9 (2001): 765-774.
Jung, Seul, and Tien C. Hsia. "Neural network inverse control techniques for PD controlled robot manipulator."Robotica 18.03 (2000): 305-314.
Jung, Seul, and T. C. Hsia. "Robust neural force control scheme under uncertainties in robot dynamics and unknown environment."IEEE Transactions on Industrial Electronics 47.2 (2000): 403-412.
Jung, Seul, and T. C. Hsia. "Neural network impedance force control of robot manipulator."IEEE Transactions on Industrial Electronics 45.3 (1998): 451-461.
Jung, Seul, and Tien C. Hsia. "On an effective design approach of cartesian space neural network control for robot manipulators." Robotica 15.03 (1997): 305-312.
Jung, S., and T. C. Hsia. "A study on new neural network schemes for robot manipulator control."Robotica 14.1 (1996): 7-16.
T. C. Hsia and Seul Jung "A Simple Alternative Approach of Cartesian Space Neural Network Control of Robot manipulators."IEEE Transaction on Industrial Electronics 42.4 (1995): 414-416.
Jung, Seul, and Tien C. Hsia. "A new neural network control technique for robot manipulators."Robotica 13.05 (1995): 477-484.
{kind=link}